








CenterPoint
3D object detection model optimized for LiDAR‑based autonomous driving scenarios.
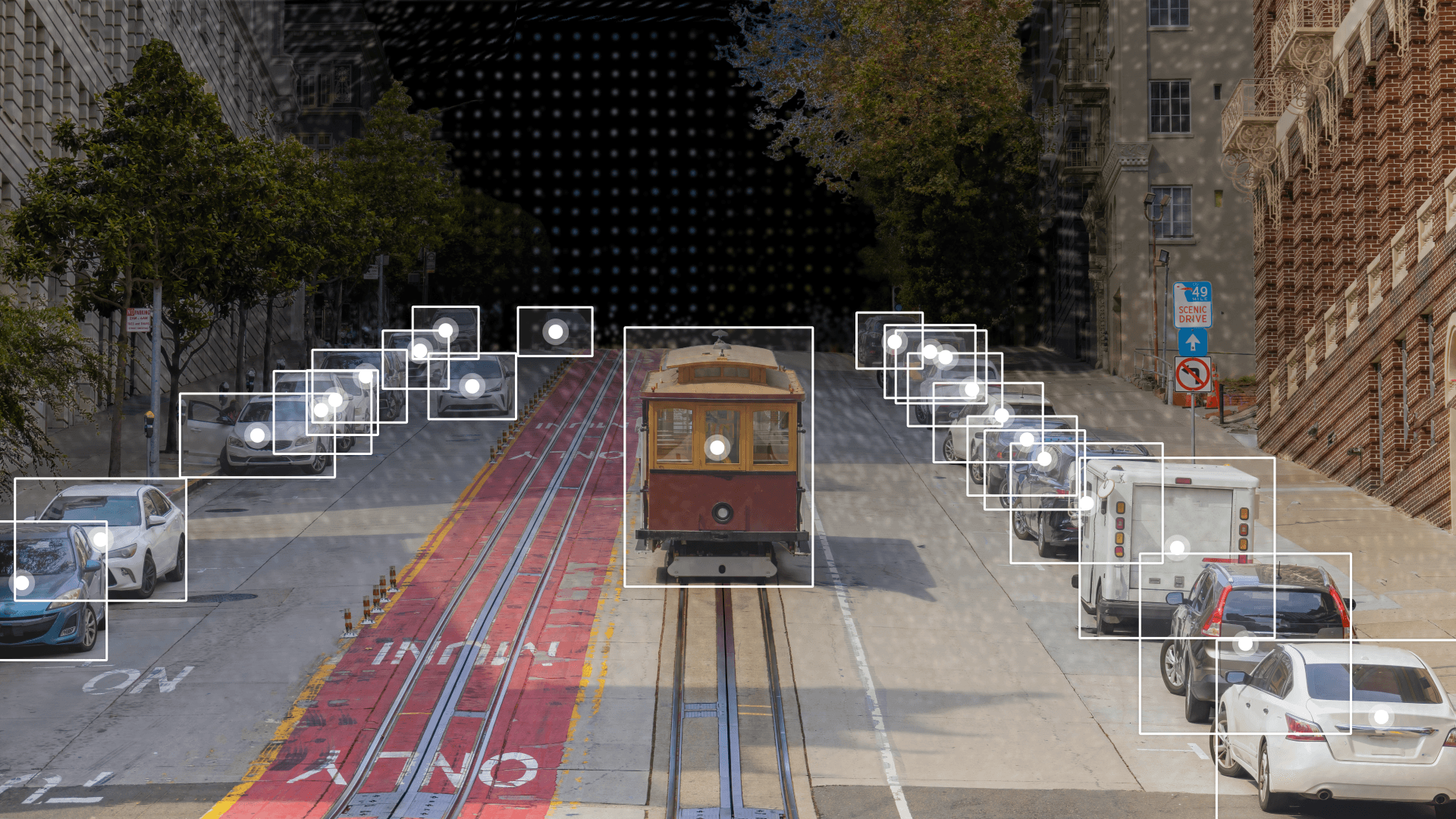
CenterPoint is a LiDAR‑based 3D object detection model that detects objects by predicting their centers and regressing other attributes. It is designed for high accuracy and real‑time performance in autonomous driving applications.
Not supported
This model is currently not supported on any Compute chipset.
To see performance metrics for this model on other chipsets, click the button below.
View for other chipsetsTechnical Details
Model checkpoint:PointPillars
Input resolution:5x20x5, 5x4, 5
Number of parameters:21.8M
Model size:83.3 MB
Applicable Scenarios
- Self driving cars
License
Model:MIT
Supported Compute Devices
- Snapdragon X Elite CRD
- Snapdragon X Plus 8-Core CRD
- Snapdragon X2 Elite CRD
Supported Compute Chipsets
- Snapdragon® X Elite
- Snapdragon® X Plus 8-Core
- Snapdragon® X2 Elite
Looking for more? See models created by industry leaders.
Discover Model Makers